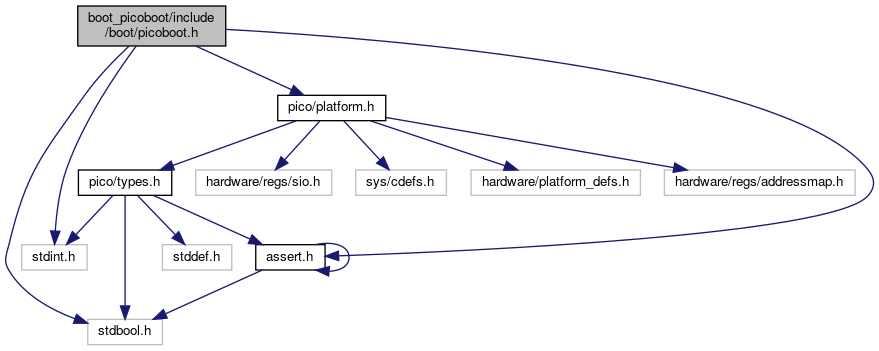
#include <stdint.h>
#include <stdbool.h>
#include <assert.h>
#include "pico/platform.h"
Go to the source code of this file.
|
|
#define | PICOBOOT_MAGIC 0x431fd10bu |
| |
|
#define | PICOBOOT_IF_RESET 0x41 |
| |
|
#define | PICOBOOT_IF_CMD_STATUS 0x42 |
| |
|
| enum | picoboot_cmd_id {
PC_EXCLUSIVE_ACCESS = 0x1,
PC_REBOOT = 0x2,
PC_FLASH_ERASE = 0x3,
PC_READ = 0x84,
PC_WRITE = 5,
PC_EXIT_XIP = 0x6,
PC_ENTER_CMD_XIP = 0x7,
PC_EXEC = 0x8,
PC_VECTORIZE_FLASH = 0x9
} |
| |
| enum | picoboot_status {
PICOBOOT_OK = 0,
PICOBOOT_UNKNOWN_CMD = 1,
PICOBOOT_INVALID_CMD_LENGTH = 2,
PICOBOOT_INVALID_TRANSFER_LENGTH = 3,
PICOBOOT_INVALID_ADDRESS = 4,
PICOBOOT_BAD_ALIGNMENT = 5,
PICOBOOT_INTERLEAVED_WRITE = 6,
PICOBOOT_REBOOTING = 7,
PICOBOOT_UNKNOWN_ERROR = 8
} |
| |
| enum | picoboot_exclusive_type { NOT_EXCLUSIVE = 0,
EXCLUSIVE,
EXCLUSIVE_AND_EJECT
} |
| |
|
|
struct __packed | __aligned (4) picoboot_cmd |
| |